精密
離心機(jī)主要用于線加速度計(jì)等慣性儀表的校準(zhǔn) [1-2] 。靜態(tài)半徑是向心加速度的重要組成部分,其 和檢測(cè) 高精度測(cè)量關(guān)系到精密
離心機(jī)輸出加速度值的準(zhǔn)確度和 不確定度,進(jìn)而影響加速度計(jì)的校準(zhǔn)和檢測(cè)精度 精 密
離心機(jī)靜態(tài)半徑的測(cè)量不確定度**少要比精密離心機(jī)輸出加速度的測(cè)量不確定度高 1 倍甚**更高,對(duì)于加速 度相對(duì)標(biāo)準(zhǔn)不確定度為 10
- 5 或 10
- 6 量級(jí)的精密離心機(jī), 其對(duì)靜態(tài)半徑測(cè)量方法、測(cè)量系統(tǒng)以及精密離心機(jī)自身 的整體性能都提出了極高要求。目前G內(nèi)外主要有 2 種靜態(tài)半徑測(cè)量方法。一是采用精密量塊和基準(zhǔn)環(huán)或激光自準(zhǔn)直儀等進(jìn)行直接測(cè)
[4-6]
量 。該方法受離心機(jī)主軸回轉(zhuǎn)誤差和加速度計(jì)質(zhì)心不確定性影響較大,且測(cè)量環(huán)節(jié)多,測(cè)量精度不高,一般
只用于低精度的精密離心機(jī)靜態(tài)半徑測(cè)量。
[7]
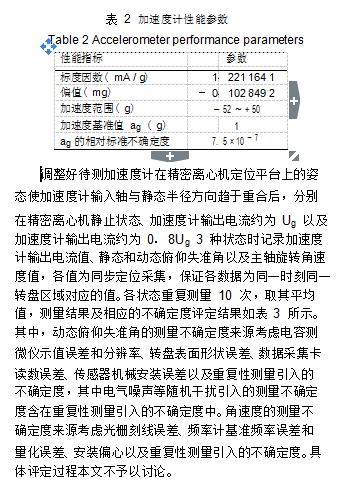
反算法 測(cè)量靜態(tài)半徑是以重力場(chǎng)下的某個(gè)加速度值( 一般取 1g) 為基準(zhǔn),調(diào)整精密離心機(jī)轉(zhuǎn)速使待測(cè)加速度計(jì)輸出值等于該基準(zhǔn)值,通過(guò)修正的加速度載荷公式來(lái)反算該狀態(tài)下的工作半徑,以此作為精密離心機(jī)的基準(zhǔn)半徑,其他狀態(tài)的工作半徑等于該基準(zhǔn)半徑加上相應(yīng)的離心機(jī)轉(zhuǎn)盤或大臂的徑向動(dòng)態(tài)變化量。文獻(xiàn)[8]提供的靜態(tài)半徑反算法只考慮向心加速度,適用于一般精度或低精度的精密離心機(jī); 文獻(xiàn)[9]提出的靜態(tài)半徑反算法測(cè)量精度有所提高,但沒(méi)有考慮加速度計(jì)制造及安裝夾具帶來(lái)的俯仰失準(zhǔn)角對(duì)靜態(tài)半徑的影響,而且受加速度計(jì)自身、加速度模型方程以及測(cè)量?jī)x器的系統(tǒng)偏差影響較大,也不能用于高精度精密離心機(jī)的靜態(tài)半徑測(cè)量。此外,采用測(cè)量不確定度來(lái)定量評(píng)價(jià)測(cè)量結(jié)果的精度在G內(nèi)外正成為一種趨
[10-14],
勢(shì) 然而精密離心機(jī)靜態(tài)半徑測(cè)量不確定度評(píng)定方面的工作G內(nèi)外沒(méi)有公開的文獻(xiàn)報(bào)道,G內(nèi)僅有 2 篇文獻(xiàn)作
[5-6]
了簡(jiǎn)要的敘述和說(shuō)明 。由于高精度精密離心機(jī)及其靜
態(tài)半徑測(cè)量很難采用更高精度的儀器或設(shè)備來(lái)檢定、校核其精度,科學(xué)、合理的測(cè)量不確定度評(píng)定模型及評(píng)定方法
就變得非常重要。
本文提出一種改進(jìn)的反算法,使之能夠應(yīng)用于 10
- 5 以下量級(jí)的高精度精密離心機(jī)靜態(tài)半徑測(cè)量,構(gòu)建測(cè)量系統(tǒng)及不確定度評(píng)定模型,并在自研的 10
- 5 量級(jí)精密離
心機(jī)靜態(tài)半徑測(cè)量中得到了較好應(yīng)用。
2 靜態(tài)半徑測(cè)量反算法
2. 1 測(cè)量原理
不同精度等級(jí)的精密離心機(jī)對(duì)靜態(tài)半徑測(cè)量精度要求不同,表 1 給出了不同精度的精密離心機(jī)對(duì)應(yīng)的工作半徑測(cè)量精度要求。工作半徑等于靜態(tài)半徑與動(dòng)態(tài)半徑之和,故靜態(tài)半徑的測(cè)量精度還要高于表 1 中數(shù)值。對(duì)于高精度精密離心機(jī),靜態(tài)半徑測(cè)量精度要求極高,其測(cè)量過(guò)程中考慮的影響因素增多,這些需要考慮的因素在
下文中進(jìn)行分析。
[4]
表 1 精密離心機(jī)等級(jí)分類
Table 1 Classification of precision centrifuge

|
序號(hào) |
精密離心機(jī) |
精密離心機(jī)加速度 |
工作半徑測(cè)量不 |
|
準(zhǔn)確度等級(jí)準(zhǔn) |
測(cè)量不確定度 |
確定度要求 |
|
|
|
|
|
|
|
|
1 |
0. 1 級(jí) |
10 - 3 |
5 × 10 - 4 |
|
2 |
0. 01 級(jí) |
10 - 4 |
5 × 10 - 5 |
|
3 |
0. 001 級(jí) |
10 - 5 |
7 × 10 - 6 |
|
4 |
0. 000 1 級(jí) |
10 - 6 |
7 × 10 - 7 |

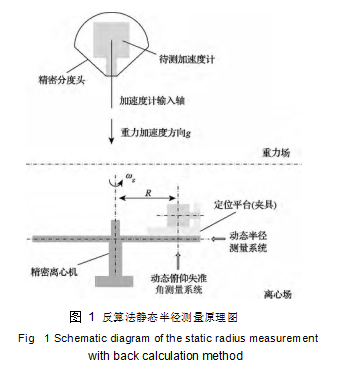
采用待測(cè)加速度計(jì)輸出值來(lái)反算精密離心機(jī)靜態(tài)半徑的原理如圖 1 所示。靜態(tài)半徑定義為主軸回轉(zhuǎn)軸線到待測(cè)加速度計(jì)有效質(zhì)量中心的距離。待測(cè)加速度計(jì)輸入軸與精密離心機(jī)工作半徑方向重合時(shí),加速度計(jì)感受到的加速度含有向心加速度,而向心加速度又是靜態(tài)半徑的函數(shù),故加速度計(jì)輸出值中含有靜態(tài)半徑的信息。結(jié)合加速度計(jì)在重力場(chǎng)下校準(zhǔn)得到的一階靜態(tài)模型方程以及其他測(cè)量分量,按照已確定的精密離心機(jī)輸出到加速度計(jì)輸入軸上的加速度數(shù)學(xué)模型即可反解出此狀態(tài)的靜態(tài)半徑值,精密離心機(jī)在工作狀態(tài)的半徑等于該靜態(tài)半徑值與轉(zhuǎn)盤或大臂的徑向動(dòng)態(tài)變化量之代數(shù)和。
上述反算法測(cè)量靜態(tài)半徑的具體步驟如下:
第 1 步: 使用**重力儀測(cè)量當(dāng)?shù)刂亓铀俣戎担⒂镁芊侄阮^等專業(yè)儀表使加速度計(jì)工作軸向與重力加
速度方向成不同的角度,讀取加速度計(jì)在 0 ~ 1g 加速度輸入下的電壓或電流輸出值,擬合出加速度計(jì)在重力場(chǎng)下的零次項(xiàng)系數(shù)和標(biāo)度因數(shù),標(biāo)定出加速度計(jì)的一次靜態(tài)模型方程;
第 2 步: 將待測(cè)加速度計(jì)安裝到精密離心機(jī)的定位平臺(tái)或夾具上,調(diào)整加速度計(jì)姿態(tài)使加速度計(jì)輸入軸盡量與精密離心機(jī)工作半徑方向重合。
第 3 步: 驅(qū)動(dòng)精密離心機(jī)轉(zhuǎn)動(dòng),使待測(cè)加速度計(jì)
輸出電壓或電流等于 U
g ( U
g 對(duì)應(yīng)的加速度計(jì)輸入值記為 a
g ,通常基準(zhǔn) a
g 約為 1 g 或小于 1 g ) 時(shí),穩(wěn)定轉(zhuǎn)速,此時(shí)的轉(zhuǎn)速記為 ω
g 。對(duì)于較高精度的精密離心機(jī),此狀態(tài)下加速度計(jì)輸入軸上感知的加速度除了向
|
心加速度,還包括重力加速度以及科里奧利加速度 |
|
等,根據(jù)加速度載荷簡(jiǎn)化公式,有: |
|
|
|
|
|
|
|
|
ag = ω2g R + λg g ± 2ωg ωε Rsin θ |
( 1) |
|
為了便于測(cè)量,式( 1) 可以進(jìn)一步轉(zhuǎn)化為: |
|
|
ag = ω2g R + ( λ + λg ) g ± 2ωg ωε Rsin θ |
( 2) |
|
式中: R 為精密離心機(jī)在加速度 ag 下的基準(zhǔn)半徑,即靜 |
|
態(tài)半徑; λg 為角速度等于 ωg 時(shí)的俯仰失準(zhǔn)角,rad,包括 |
|
動(dòng)態(tài)俯仰失準(zhǔn)角 λg 和靜態(tài)俯仰失準(zhǔn)角 λ; ωε |
為地球自 |
|
轉(zhuǎn)角速度,rad / s; θ 為精密離心機(jī)所在之地的地球緯度。 |
|
對(duì)于北半球G家,精密離心機(jī)逆時(shí)針?lè)较蛐D(zhuǎn)時(shí)式( 1) 、 |
|
( 2) 中“± ”號(hào)取“+ ”。 |
|
|
|
|
通過(guò)式( 1) 即可反解出靜態(tài)半徑為: |
|
|
|
ag - λg g |
|
ag - ( λ + λg ) g |
( 3) |
|
R = |
|
= |
|
|
|
|
ω2g ± 2ωg ωε sin θ |
|
ω2g ± 2ωg ωε sin θ |
|
|
|
|
|
|
|
|
式中: |
|
|
|
|
ag = Ug / k1 - k0 |
|
|
( 4) |
|
|
|
|
|
|
式中: k0 為待測(cè)加速度計(jì)的偏值,g 或 m / s2 ; k1 為待測(cè)加 |
|
|
|
速度計(jì)的標(biāo)度因素,V / g 或 A / g。 |
|
|
|
|
|
聯(lián)合俯仰失準(zhǔn)角和旋轉(zhuǎn)角速度測(cè)量結(jié)果,即可得到 |
|
|
|
靜態(tài)半徑值。式( 1) 可看出,俯仰失準(zhǔn)角 λg 應(yīng)該包括加 |
|
|
|
速度計(jì)輸入軸和安裝夾具帶來(lái)的失準(zhǔn)角偏差,然而實(shí)際 |
|
|
|
采用電子水平儀測(cè)量得到的俯仰失準(zhǔn)角是定位平臺(tái)或離 |
|
|
|
心機(jī)大臂相對(duì)于地球表面的角度。即使采用其他測(cè)量裝 |
|
|
|
置也很難直接準(zhǔn)確測(cè)量得到加速度計(jì)輸入軸相對(duì)于地表 |
|
|
|
的俯仰失準(zhǔn)角。粗略計(jì)算,1″的俯仰失準(zhǔn)角偏差將導(dǎo)致 |
|
|
|
靜態(tài)半徑 5 × 10 - 6 的相對(duì)誤差,而實(shí)際加速度計(jì)及安裝夾 |
|
|
|
具的俯仰失準(zhǔn)角不止 1″。因此如何補(bǔ)償不可測(cè)的俯仰失 |
|
準(zhǔn)角成為制約上述靜態(tài)半徑測(cè)量方法在高精度精密離心 |
|
|
|
機(jī)上應(yīng)用的關(guān)鍵。 |
|
|
|
|
|
|
|
|
|
此外,待測(cè)加速度計(jì)自身分辨率以及各測(cè)量?jī)x器 |
|
|
|
的誤差將通過(guò)式 ( 3 ) 的間接測(cè)量關(guān)系影響靜態(tài)半徑 |
|
|
|
|
|
|
|
反算精度。精密離心機(jī)輸出加速度因素考慮不全面 |
|
|
|
也會(huì)導(dǎo)致加速度模型式 ( 1 ) 與加速度計(jì)實(shí)際輸入的 |
|
值存在偏差,進(jìn)而影響靜態(tài)半徑測(cè)量準(zhǔn)確度。一般精 |
|
密離心機(jī)的精度都是高于待標(biāo)定加速度計(jì)的精度 1 |
|
或 2 個(gè)量級(jí),而靜態(tài)半徑測(cè)量精度又必須高于精密離 |
|
心機(jī)的精度。表面上看,采用低精度的待測(cè)加速度計(jì) |
|
|
|
來(lái)反算高精度的靜態(tài)半徑是矛盾的。實(shí)際上反算法 |
|
|
|
測(cè)量靜態(tài)半徑只利用了重力場(chǎng)下的加速度計(jì)輸入輸 |
|
出特性。重復(fù)性精度方面,待測(cè)加速度計(jì)在重力場(chǎng)下 |
|
已校準(zhǔn)得到的一次靜態(tài)模型以及精密離心機(jī)主軸轉(zhuǎn) |
|
速的重復(fù)性精度可以做到很高,能夠滿足靜態(tài)半徑測(cè) |
|
量重復(fù)性精度要求。系統(tǒng)誤差方面,上述反算法受加 |
|
速度計(jì)自身和加速度模型方程式 ( 4 ) 以及測(cè)量?jī)x器 |
的系統(tǒng)偏差影響較大。
|
2. 2 |
反算法改進(jìn) |
|
|
|
|
|
|
|
|
傳統(tǒng)的靜態(tài)半徑反算法是將待測(cè)加速度計(jì)安裝到精 |
|
|
|
密離心機(jī)上,調(diào)整好加速度計(jì)輸入軸姿態(tài)盡量與精密離 |
|
心機(jī)工作半徑方向重合后,直接驅(qū)動(dòng)精密離心機(jī)旋轉(zhuǎn),記 |
|
錄加速度計(jì)輸出值 Ug 和對(duì)應(yīng)的轉(zhuǎn)速 ωg ,其中 Ug 對(duì)應(yīng)的 |
|
加速度計(jì)輸入值為 ag ,通常 ag 約為 1g 或小于 1g。本文 |
|
提出的靜態(tài)半徑反算法是在調(diào)整好待測(cè)加速度計(jì)輸入軸 |
|
盡量與精密離心機(jī)工作半徑方向重合后,進(jìn)行以下 2 次 |
|
反算: |
|
|
|
|
|
|
|
|
|
|
|
|
|
shou先,不啟動(dòng)精密離心機(jī)旋轉(zhuǎn),直接讀出此時(shí)待測(cè)加 |
|
速度計(jì)的輸出電壓或電流值,記為 U0 。由于此狀態(tài)精密 |
|
離心機(jī)轉(zhuǎn)速為零,加速度計(jì)輸入軸感知到的加速度只有 |
|
俯仰失準(zhǔn)角作用下的重力加速度,即: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( 5) |
|
|
a0 = gλ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
式中: a0 為不啟動(dòng)離心機(jī)時(shí)的待測(cè)加速度計(jì)輸入值; λ 為 |
|
加速度計(jì)輸入軸相對(duì)于地表的靜態(tài)俯仰失準(zhǔn)角,rad。 |
|
一般電子水平儀測(cè)量得到的是定位平臺(tái)或離心機(jī)大 |
|
|
|
臂相對(duì)于地表的俯仰失準(zhǔn)角,故將 λ 分為 2 個(gè)角度之和 |
|
|
|
的形式,即: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a0 = g( λ0 + λ1 ) |
|
|
|
|
|
( 6) |
|
|
|
|
|
|
|
|
|
|
|
式中: λ0 為可測(cè)量的定位平臺(tái)或大臂相對(duì)于地表的靜態(tài) |
|
|
|
俯仰失準(zhǔn)角,rad。λ1 為不可測(cè)的或測(cè)不準(zhǔn)的加速度計(jì)靜 |
|
|
|
態(tài)俯仰失準(zhǔn)角,rad。 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
其次,啟動(dòng)精密離心機(jī)旋轉(zhuǎn),使待測(cè)加速度計(jì)輸出電 |
|
|
|
壓或電流為基準(zhǔn)值 Ug ,穩(wěn)定轉(zhuǎn)速,讀出此時(shí)的精密離心 |
|
|
|
機(jī)轉(zhuǎn)速 ωg 。有: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ag = ω2g R + ( λ0 |
+ λ1 + |
|
λg ) g ± 2ωg ωε Rsin θ |
( 7) |
|
|
式中: λg 為 ωg 轉(zhuǎn)速下的動(dòng)態(tài)俯仰失準(zhǔn)角,rad。 |
|
|
|
|
|
|
|
式( 6) 與( 7) 相減,并利用重力場(chǎng)下已標(biāo)校好的待測(cè) |
|
|
|
加速度計(jì)標(biāo)度因數(shù) k1 ,有: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ag - a0 - |
λg g |
( Ug - U0 ) / k1 - λg g |
|
|
|
R = |
|
|
|
|
( 8) |
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
± 2ωg ωε sin θ |
|
|
|
|
|
|
|
ωg |
|
|
ωg ± 2ωg ωε sin θ |
|
|
|
如果調(diào)整待測(cè)加速度計(jì)在精密離心機(jī)定位平臺(tái)上的 |
|
姿態(tài)后靜態(tài)俯仰失準(zhǔn)角和方位失準(zhǔn)角仍然較大,其量級(jí) |
|
影響了靜態(tài)半徑的測(cè)量精度,則必須補(bǔ)償二者對(duì)靜態(tài)半 |
|
徑的影響,其影響規(guī)律按式( 9) 進(jìn)行補(bǔ)償: |
|
|
|
R = |
|
|
|
( Ug - U0 ) / k1 |
- λg g |
|
( 9) |
|
|
|
( |
|
2 |
) |
cos λ0 cos λ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωg ± 2ωg ωε sin θ |
|
|
|
|
式中: λ2 為可測(cè)量的方位失準(zhǔn)角,即加速度計(jì)安裝平臺(tái) |
|
在上平面內(nèi)相對(duì)于離心機(jī)半徑方向的偏角,rad。 |
|
|
|
式( 8 ) 或 ( 9 ) 是本文提出的靜態(tài)半徑計(jì)算模型, |
|
該測(cè)量方法補(bǔ)償了不可測(cè)的加速度計(jì)輸入軸和夾具 |
|
安裝俯仰失準(zhǔn)角對(duì)靜態(tài)半徑的影響; 而且通過(guò)兩次加 |
|
速度計(jì)的輸入加速度值相減,加速度計(jì)自身、精密離 |
|
心機(jī)加速度模型、測(cè)量?jī)x器中的系統(tǒng)誤差以及加速度 |
|
計(jì)偏值 k0 被抵消,進(jìn)一步提高了測(cè)量準(zhǔn)確度。此外,與原有反算法相比,該測(cè)量方法不需要對(duì)靜態(tài)俯仰失準(zhǔn)角進(jìn)行測(cè)量,減小了測(cè)量誤差源。改進(jìn)后的靜態(tài)半徑反算法測(cè)量過(guò)程如圖 2 所示。 |
|
|
|
|
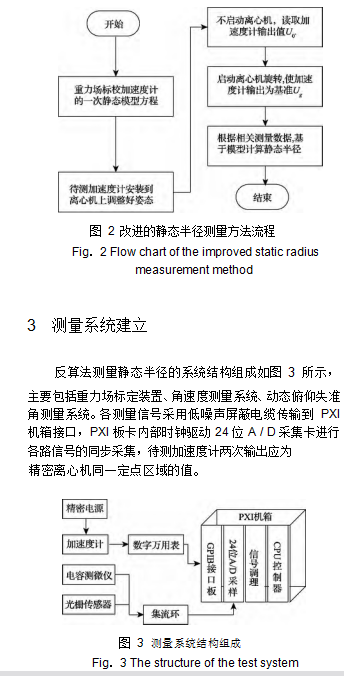
可編程精密電源采用 Agilent B2900 A 型,為待測(cè)加速度計(jì)提供高精度 ± 15 V 電壓,加速度計(jì)輸出電壓或電流利用 KEITHLE2002 型八位半數(shù)字萬(wàn)用表并經(jīng)
GPIB 接口傳輸?shù)?nbsp;PXI 機(jī)箱。角速度測(cè)量系統(tǒng)主要由圓光柵編碼器與頻率計(jì)組成,圓光柵編碼器反饋信號(hào)通過(guò)頻率計(jì)計(jì)算得到精密離心機(jī)的轉(zhuǎn)速,自研的精密離心機(jī)實(shí)際角速度相對(duì)不確定度可控制到 10
- 7 ~
10
- 8 量級(jí)。動(dòng)態(tài)俯仰失準(zhǔn)角是通過(guò)電容測(cè)微儀測(cè)量精密離心機(jī)轉(zhuǎn)盤邊沿的上下擺動(dòng)位移量來(lái)間接測(cè)量,利用光柵輸出的 Z 脈沖對(duì)測(cè)點(diǎn)定位,消除轉(zhuǎn)盤表面形狀誤差。由水銀集流環(huán)傳輸?shù)?PXI 機(jī)箱進(jìn)行信號(hào)展寬、濾波等調(diào)理。電容測(cè)微儀為德G米銥公司的 CS 系列,采用定位測(cè)量,其測(cè)量不確定度可以控制到亞微米量級(jí)。
4 測(cè)量不確定度評(píng)定模型
由于誤差評(píng)估固有的缺陷,例如不可量化、誤差定義
[15]
與實(shí)際評(píng)定不符 。越來(lái)越多的學(xué)者采用測(cè)量不確定度來(lái)評(píng)價(jià)測(cè)量結(jié)果的精度。高精度精密離心機(jī)對(duì)靜態(tài)半徑測(cè)量精度要求非常高,因此,科學(xué)合理的測(cè)量不確定度
評(píng)定變得異常重要。
上述改進(jìn)的靜態(tài)半徑測(cè)量模型中,靜態(tài)半徑 R 通過(guò)間接測(cè)量得到,其測(cè)量誤差源主要來(lái)自于加速度基準(zhǔn) a
g ( 或 U
g ) 、a
0 ( 或 U
0 ) 、動(dòng)態(tài)俯仰失準(zhǔn)角 λ
g 、旋轉(zhuǎn)角速度 ω
g 4 個(gè)分量。測(cè)量模型中的其余常量只要取足夠的有效位數(shù),引入的不確定度可忽略不計(jì)。需要注意的是 U
g 和 U
0 ( 即 a
g 和 a
0 ) 是同一加速度計(jì)的輸出值,二者明顯相關(guān)。基于測(cè)量不確定度傳遞公
[15]
式 ,通過(guò)推導(dǎo)、簡(jiǎn)化,靜態(tài)半徑測(cè)量不確定度傳遞模型為:
u
r ( R) ≈

|
2 |
( ω ) + |
g2 |
2 |
( |
λ ) |
2 |
( a ) |
|
a02 |
2 |
( a ) |
2ra0 |
u' ( a ) u' ( a ) |
|
4 u |
|
u |
+ u |
+ |
|
u |
- |
|
|
|
|
|
|
|
r |
g |
a2g |
|
|
g |
r |
g |
|
a2g |
r |
0 |
|
ag |
r gr 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( 10) |
式中: u
r ( R) 是靜態(tài)半徑 R 的相對(duì)標(biāo)準(zhǔn)不確定度; u
r ( ω
g ) 是角速度 ω
g 的相對(duì)標(biāo)準(zhǔn)不確定度; u
r ( a
g ) 是加速度 a
g
的相對(duì)標(biāo)準(zhǔn)不確定度; u( λ
g ) 是動(dòng)態(tài)俯仰失準(zhǔn)角 λ
g 的
標(biāo)準(zhǔn)不確定度,rad; u
r ( a
0 ) 是加速度 a
0 的相對(duì)標(biāo)準(zhǔn)不確定度; u
'r ( a
g ) 是 a
g 的由系統(tǒng)效應(yīng)引入的相對(duì)標(biāo)準(zhǔn)不確定度; u
'r ( a
0 ) 是 a
0 的由系統(tǒng)效應(yīng)引入的相對(duì)標(biāo)準(zhǔn)不確定度; r 是 a
0 與 a
g 的相關(guān)系數(shù)。
一般 a
g ≈g,a
g 和 a
0 不在同一數(shù)量級(jí),且 a
g > > a
0 ,其相關(guān)系數(shù)較小可以不考慮,而且 u
r ( a
0 ) 的傳遞系數(shù)很小,則靜態(tài)半徑測(cè)量不確定度傳遞模型可簡(jiǎn)化為:
u
r ( R) ≈ 4u
2r ( ω
g ) + u
2 ( λ
g ) + u
2r ( a
g ) ( 11) 需要說(shuō)明的是,式( 11 ) 的計(jì)算結(jié)果準(zhǔn)確性不比式 ( 10 ) 差,這是由模型本身的特征決定的,為了簡(jiǎn)化評(píng)

定復(fù)雜度,本文采用式 ( 11 ) 作為靜態(tài)半徑測(cè)量不確定度的傳遞模型,其不確定度值由加速度值 a
g 、動(dòng)態(tài)俯仰失準(zhǔn)角 λ
g 以及旋轉(zhuǎn)角速度 ω
g 3 個(gè)分量決定。5 10
- 5 量級(jí)精密離心機(jī)靜態(tài)半徑實(shí)測(cè)
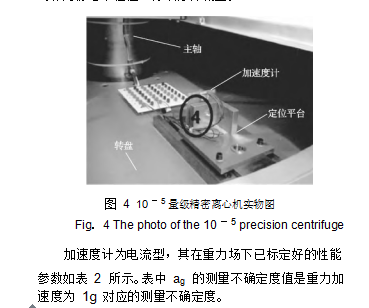
圖 4 所示是利用所提方法對(duì)研制的加速度相對(duì)標(biāo)準(zhǔn)不確定度為 10
- 5 量級(jí)的精密離心機(jī)靜態(tài)半徑進(jìn)行測(cè)量的實(shí)物圖。安裝就緒后先旋轉(zhuǎn)離心機(jī)到高速借助離心力將螺栓緊固。實(shí)際應(yīng)用時(shí)加速度計(jì)輸入軸指向主軸和相反方向 2 種狀態(tài)的靜態(tài)半徑不相等,可以取兩者的平均作為靜態(tài)半徑值,亦或分開測(cè)量。
的問(wèn)題,提出一種改進(jìn)的靜態(tài)半徑測(cè)量方法。推導(dǎo)出該測(cè)
量方法新的數(shù)學(xué)模型以及對(duì)應(yīng)的測(cè)量不確定度傳遞模型。搭建了測(cè)量系統(tǒng),對(duì)研制的 10
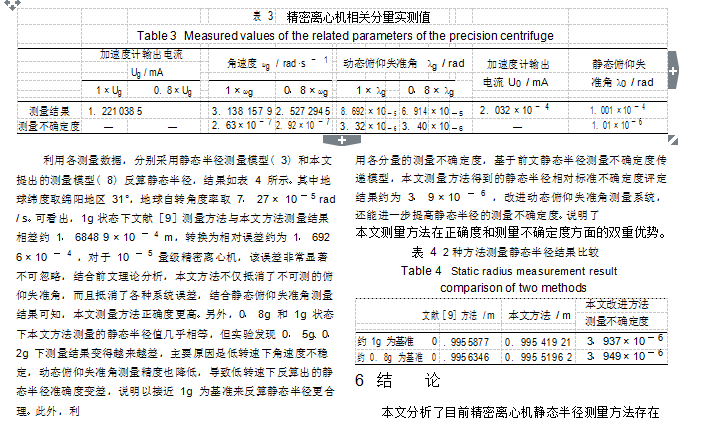
- 5 量級(jí)精密離心機(jī)靜態(tài)半徑進(jìn)行了實(shí)測(cè)。相同條件下,本文測(cè)量方法與基于文獻(xiàn)[9]的測(cè)量結(jié)果相差 10
- 4 量級(jí),該偏差對(duì) 10
- 5 和 10
- 6 量級(jí)的精密離心機(jī)影響嚴(yán)重,不可忽視。本文方法的靜態(tài)半徑相對(duì)標(biāo)準(zhǔn)不確定度評(píng)定結(jié)果約為 3. 9 × 10
- 6 。理論分析和實(shí)測(cè)結(jié)果說(shuō)明了本文測(cè)量方法在正確度和不確定度兩方面具
有的雙重優(yōu)勢(shì)。
反算法測(cè)量的是加速度計(jì)質(zhì)心到主軸回轉(zhuǎn)軸線的距離,準(zhǔn)確度遠(yuǎn)高于基于精密量塊等儀器的直接測(cè)量方法,而且本文提出的反算測(cè)量方法補(bǔ)償了不可測(cè)的俯仰失準(zhǔn)
角、加速度模型以及測(cè)量?jī)x器的系統(tǒng)誤差對(duì)靜態(tài)半徑測(cè)量精度的影響,測(cè)量準(zhǔn)確度得到了較大提高。本文提供的測(cè)量方法及不確定度評(píng)定模型可以為 10
- 5 或 10
- 6 量
級(jí)的高精度精密離心機(jī)研制提供一定的技術(shù)支撐。